This page summarises some of the translation potential of the science. Contact jusherwood@rvc.ac.uk
Lossless legs
The problem: legged robots have limited endurance and payload.
The solution: leg design following linkage leg principles avoids mechanical power demands for steady level locomotion and enable economical low-power work supply when net energy input is required. Actuation demand for translation can be decoupled from weight support and foot height control allowing specialised motors to be implemented.
This page introduces the RVC robot linkage-legs
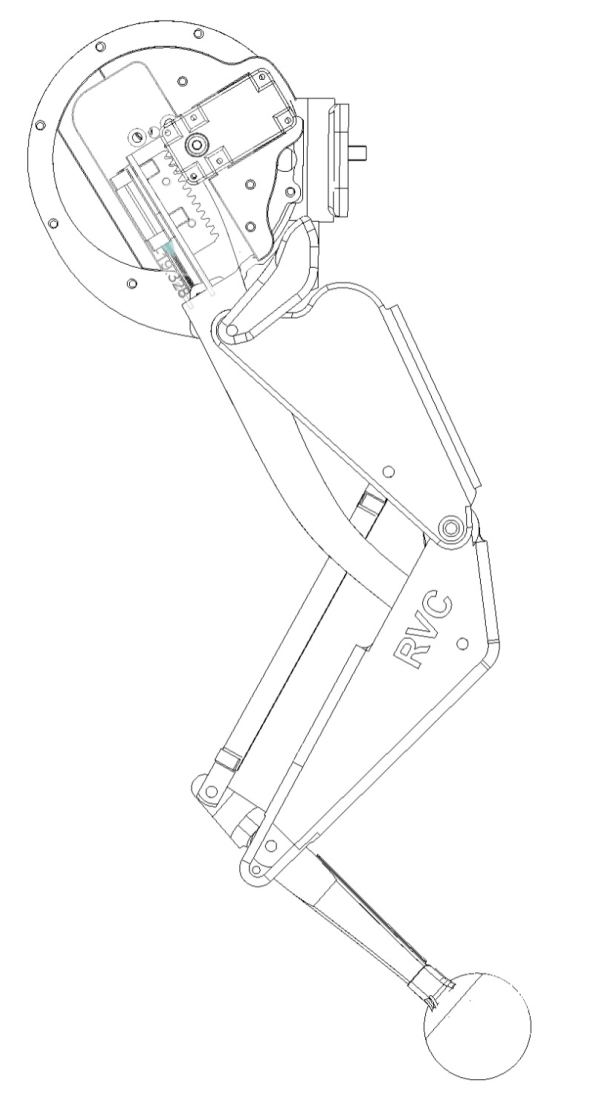
See also ARIA project; and linkages page
Foot and leg configuration
Simple geometric choices have energetic consequences. The knees-forward, elbows-back configuration of quadrupedal animals (but often not robots) avoids joint power (see THIS PAPER; no explanation page yet). The stiff human foot proportions and knee position reduce the mechanical power of walking – if used correctly (see HERE). No current humanoid robots ‘walk’ in an economical, human-like manner.
Aeroinertial suspension
The problem: turbulence is unpredictable, perturbing and potentially damaging.
The solution: wing mass distribution and hinge (shoulder) properties that act as suspension, decoupling aerodynamic perturbations from critical systems (sensing, grasping), increasing the timescale for reflex and active responses and reducing peak loads. See HERE.
Tails as flaps
The problem: minimum drag at different flight speeds and/or payloads require different planform areas and wing chord profiles.
Current resolution: flaps allow control of both wing chord (so wing area) and camber.
Problem with current resolution: complexity, chord depth, speed of deployment.
Bird resolution: tail spread: control of planform area and both gross body-tail and – through altering wing loading borne by the wings and aeroelastic deflection – wing camber. See HERE and also Jorn Cheney‘s paper HERE.
