This page entirely with Alan Wilson, FRS
Galloping performance – in terms of both speed and acceleration – provides further support for the view of Legs as Linkages that result in sliding or wheel-like weight support. Unlike human sprinters (for instance, see THIS PAPER), greyhounds do not appear to be limited by limb force: THIS PAPER reports that they can maintain top speeds and do not spread the loads by increasing duty factor when sprinting around bends.
This ability of greyhounds to withstand increased forces when sprinting around a bend is in striking contrast with humans – who appear limited by limb force – meaning that athletes on inside tracks (especially for the indoor 200m) are at a considerable disadvantage. The analogy of cycling around a banked velodrome may be appropriate: if there is a decoupling between the muscles providing power and the structures providing weight support, then the additional centripital forces required when on the bend may not demand a decrease in speed.
acceleration
Greyhounds (studied by Sarah Channon, née Williams) and polo ponies (measured by Huiling Tan) have an upper limit to their acceleration, at 1g (10m/s^2) or 0.6g (6m/s^2) respectively. See THIS PAPER.
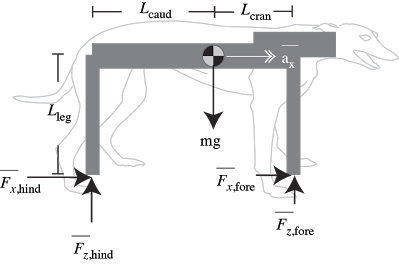
Greyhound accelerating out of the traps. Note how the front feet are barely loaded.
The maximum acceleration limits are consistent with treating the animals like a motorcycle. As a racing motorcycle acelerates, it is not limited by the power of the engine; rather, the tendency to pitch up (‘wheelie’) is limiting. This suggests a very simple geometric model: over a stride, the average hindlimb force can pass behind the centre of mass (and some weight is supported by the front legs) or through the centre of mass (completely unloading the front legs, as in the video above), but not ahead; like the motorbike, the dog or horse should not flip over backwards. Given the ratio of the distance between hips and centre of mass to the back leg length is 1:1 for greyhounds, and 0.6:1 for ponies, the maximum measured accelerations are on the ‘wheely limit’.
These observations again support the view that analogies can be made between animal legs and wheels. Details of why and how this might be the case are explored in the Legs as Linkages page.
