In human walking, the body rises and falls over a stance leg before a smooth step-to-step transition into the next vaulting stance. THIS PAPER shows how this is achieved, and correctly predicts the leg and foot geometry of modern humans.
The transition results from joints effectively locking and unlocking in rapid sequence due to simple geometric changes loading and unloading a series of muscles.

The series of locked joints results in a sequence of linkages that form ‘virtual legs’ (blue dashed lines). With locking muscles that simply hold on and don’t change length, each virtual leg results in a change of direction of the body perpendicular to each virtual leg: there is a series of mini-vaults within the step-to-step transition. For instance, a vertical virtual leg resulting in horizontal motion of the body (snapshot 3) is produced by the 4-bar linkage with joints at knees, balls-of-feet (trailing leg) and heel (leading leg).
Collision mechanics indicate that, for a given number of virtual legs, the most economical geometry is the one that spreads the virtual legs at constant angles. This is clear from two rimless wheels with the same number of spokes: the one with the even spread of spokes can roll down the shallower slope.
The linkage geometry that results in exactly even spacing of virtual legs looks like this:
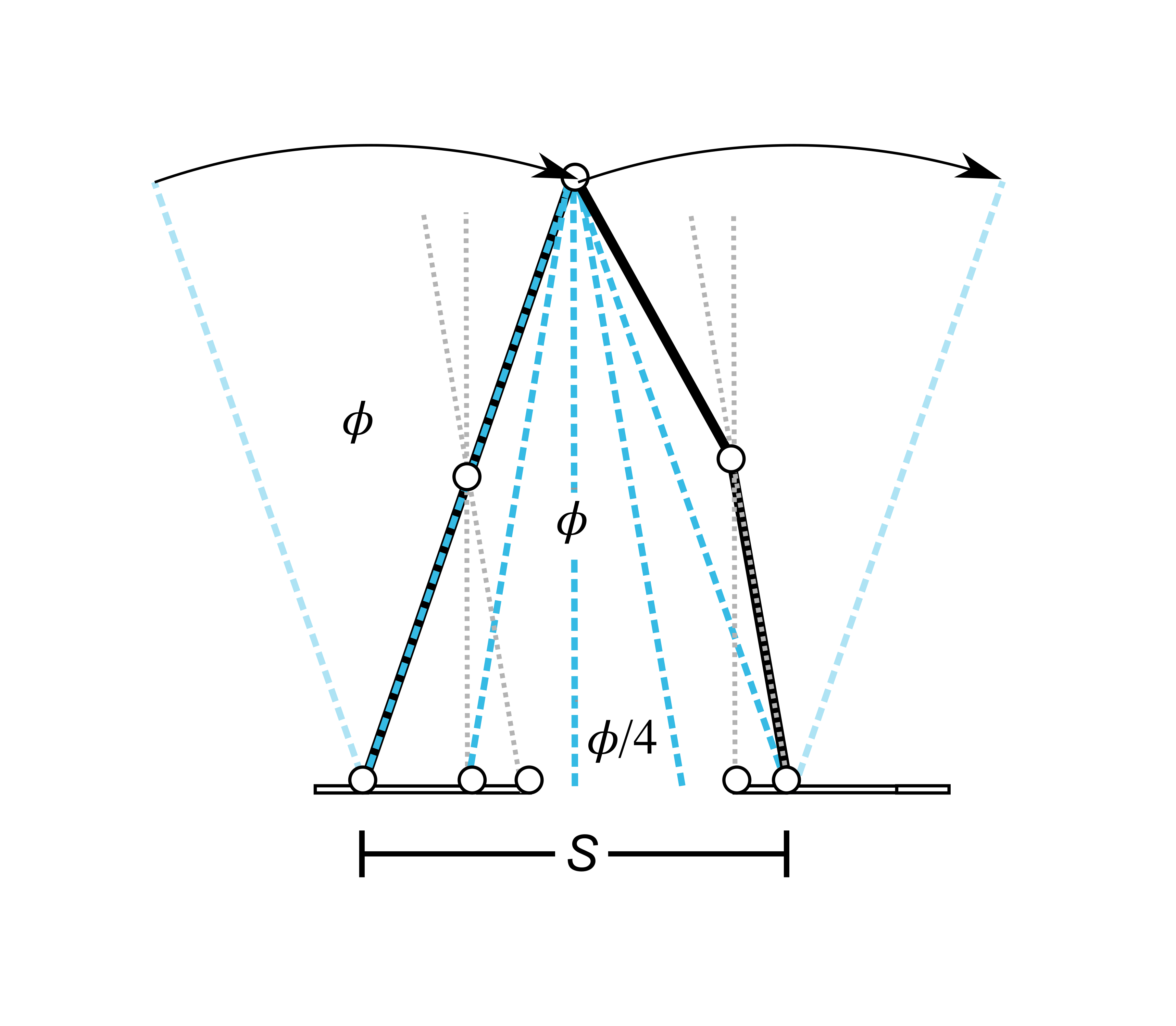
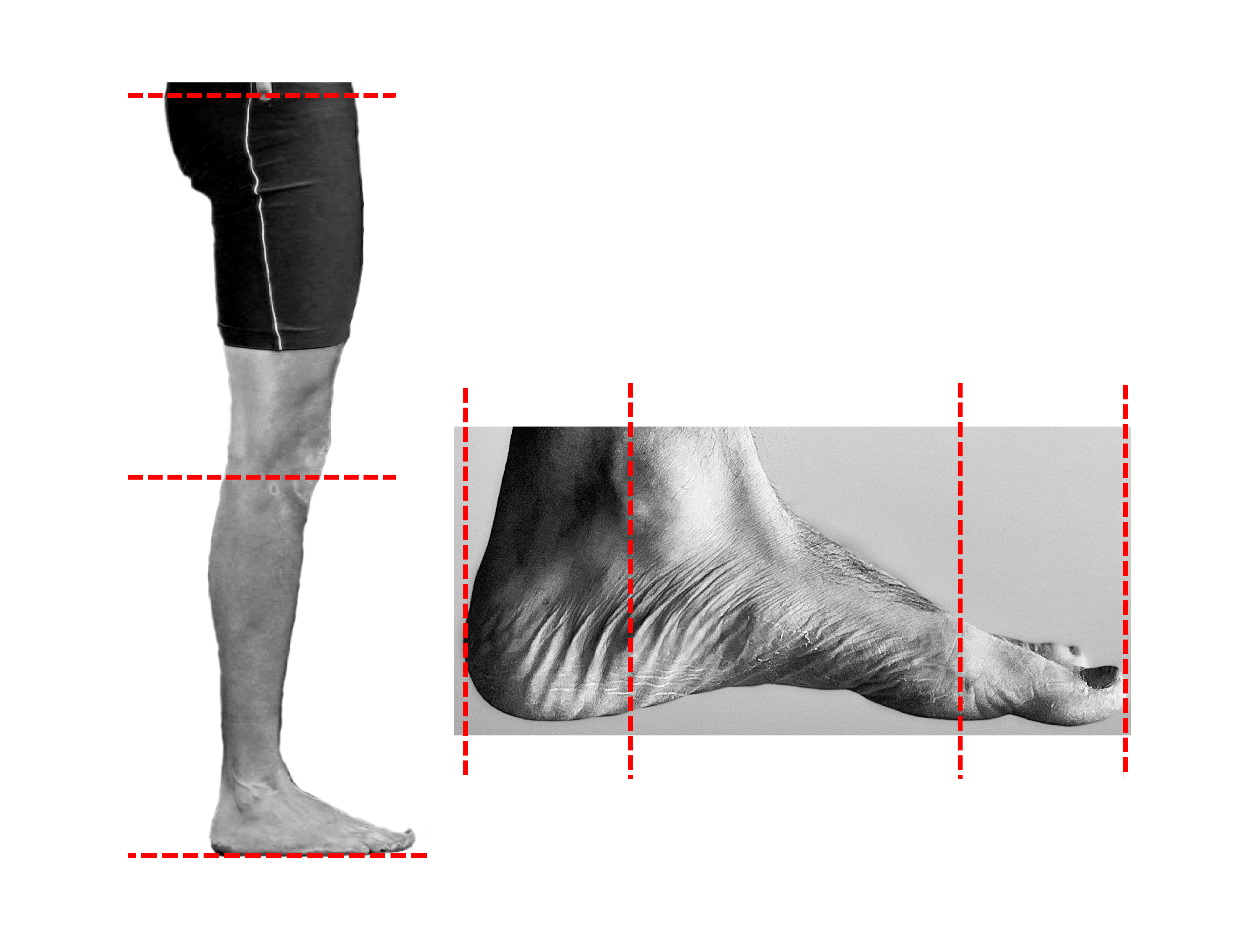
This geometry allows predictions concerning leg and foot proportions: the knee should be halfway down the leg; the heel and toe should be 1/4 foot length; the midfoot 1/2 foot length; and the step S should be 2-3 feet. This appears to be in remarkably good agreement with modern human legs and walking gait.
This collision mechanics of human walking with a long vault of the hips over the ankle, and a rapid sequence of 4 step changes in velocity (no account is taken of how recovery from the losses is powered) before the next long vault can be modelled with a rolling polygon:
The linkages involved in the step-to-step transition are demonstrated here with laser-cut 2mm MDF parts with plans, using four small split-pins or brads and card template (A4, ensure printing at 100% scale).
step-to-step transition.
