Introducing RVC robot linkage-legs (funded by ARIA).
Automatons can be economical – powered by wind (1) or gentle incline (2,3) – and need no control; however, they are not adaptable.
Current robot arms-as-legs are uneconomical – motors continuously work against each other – and require enormous control, even for simple tasks; however, they are adaptable.
The premise behind the RVC robot linkage legs is that, with careful design, the benefits of automaton-style economy and geometric control can be achieved, particularly during weight support, while also providing the capacity for controlled, adaptable foot placement. A 6-bar linkage enables decoupling of horizontal and vertical motions, allowing specialisation of motor properties. Here, the horizontal position of the foot is determined by the angle of the driving link (thick black; angle in pink), while the vertical position is determined by the length actuator of the driving link (red).
This robot linkage leg allows – theoretically – weight to be supported throughout horizontal translation without any motor power demand. Power will be required for acceleration and ascent, and to drive the leg against its own inertia during the swing phase, and to overcome various other losses. But the straight-line ‘sliding’ motion imposed by the 6-bar linkage with the Length motor locked at constant length exploits the work avoidance mechanism of many of the legged automatons.
6-bar linkage leg stepping animation.
In terms of control, consider a leg that transitions from swinging forward without load to swinging backwards rapidly (at ground speed – in a body frame of reference) while supporting a large vertical load. This is challenging with the conventional robot ‘arms-as-legs’, and is prone to ‘failing hard’ if the motors cannot accelerate sufficiently to immediately drive the foot at ground speed. With the 6-bar design, both demands can be achieved passively, without control, and at un-predicted height, with a non-back-driveable ‘Length’ actuator ensuring weight support, and a back-driveable ‘Angle’ motor allowing the foot to be driven at ground speed by the ground. This allows ‘control’ responses (in the example here, when to initiate the swing trajectory) to operate at a much longer timescale – large proportions of the cycle – than with conventional robot legs.
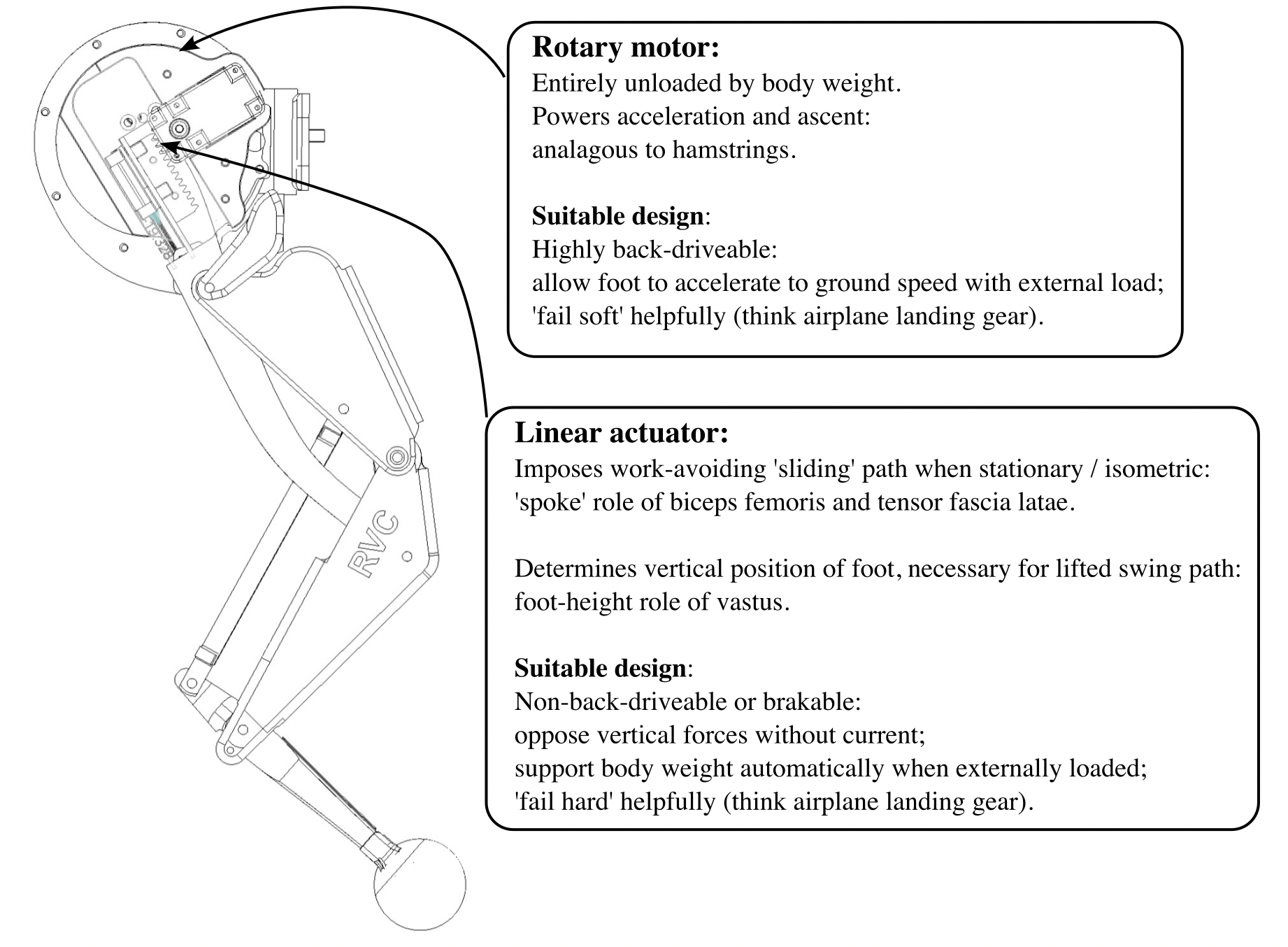
Robot leg design overview with motor functions and muscle equivalents.
Interested?
Do contact jusherwood@rvc.ac.uk if interested.
